Státní univerzita v Penze
Tato práce se skládá ze dvou částí: vývoj univerzálního modulu pro tyristorový regulátor výkonu a vývoj univerzálního modulu pro ovládání regulátorů. Tyto moduly jsou vyvinuty pro použití v zařízeních pro měření parametrů elektronek, ale lze je použít i v jiných elektronických zařízeních.
2. Univerzální tyristorový regulátor výkonu SCR 3 M
2.1. Regulátor je určen k regulaci výkonu aktivních (žárovky, topidla) nebo aktivních indukčních (elektromotory, transformátory) zátěží napájených ze sítě 220 V 50 Hz. Regulátor byl vyvinut pro regulaci otáček elektromotorů ventilačních zařízení a výkonu ohřívačů elektronkových zařízení připojených k síti přes redukční transformátor. Vzhledem k tomu, že uvedené zátěže jsou indukčního charakteru, byla při prototypování regulátoru testována jeho schopnost pracovat s těmito typy zátěží. Regulátor lze použít jak s ručním ovládáním (pomocí proměnného rezistoru), tak v systémech s automatickým ovládáním (přivedení ovládacího napětí).
2. 2. Výběr schématu ovládání.
V současné době se rozšířilo několik tyristorových řídicích obvodů. Nejjednodušší a nejúspornější obvody jsou ty, které aktivují tyristor dodáním krátkého proudového impulsu do jeho řídící elektrody. Vzhledem k hospodárnosti obvodů tohoto typu je lze napájet ze sítě 220 V přes předřadný odpor (a nikoli výkonový transformátor), což dramaticky snižuje cenu regulátoru. Nevýhodou takových obvodů je nespolehlivost rozběhu tyristoru při indukční zátěži, protože při působení otevíracího impulsu nedosáhne proud tyristorem přídržného proudu. Tuto nevýhodu lze snížit použitím tyristorů s nízkým přídržným proudem a paralelním připojením odporu k indukční zátěži.
Jako prahové zařízení v tyristorovém řídicím obvodu se nyní často používají dinistory (např. KN102) nebo symetrické dinistory (např. DB 3). Použití dinistoru umožňuje výrazně zjednodušit řídicí obvod. Jak však ukázaly experimenty, regulační obvody na bázi dinistorů mají hysterezi, tedy různé charakteristiky při otáčení regulačního knoflíku ve směru klesajícího a rostoucího výkonu. Hystereze ztěžuje ovládání regulátoru, což je patrné zejména při minimálním výstupním výkonu. U regulátorů s dinistorem lze hysterezi snížit, ale nelze ji zcela odstranit. Proto byl řídicí obvod realizován pomocí tranzistorů.
Někdy je nutné zorganizovat dálkové ovládání regulátoru výkonu. Může být vyžadován při použití regulátoru v systému s automatickou regulací (teplota, napětí, otáčky) nebo v systému s řídicím počítačem. V mnoha případech musí mít řídicí vstup galvanické oddělení např. od sítě 220 V, aby byla zajištěna bezpečnost obsluhy. Proto bylo rozhodnuto zajistit ovládání pomocí optočlenu. Vzhledem k tomu, že široce používané tranzistorové optočleny typu AOT127 nebo 4 N 35 stojí kolem několika rublů, ukazuje se jako výhodnější použít pro řízení výkonné zátěže regulátor s optočlenem než výkonné optočlenové tyristory, například typu TO125.
2. 3. Výběr pohonné jednotky.
Dnes je komerčně dostupných několik běžných typů tyristorů a triaků. Tyristory lze také nazývat křemíkové řízené ventily (SCL). V zahraniční literatuře se obvykle nazývají Silicon Controlled Rectifiers (SCR). Tyristory mohou vést proud pouze jedním směrem. Proto při jejich použití se zátěží pracující na střídavý proud, například elektromotory, jsou instalovány dva tyristory – jeden pro kladnou půlperiodu a druhý pro zápornou, nebo se používá jeden tyristor spolu s usměrňovacím můstkem, což vede ke zvýšení velikosti a nákladů na regulátor.
Simistory („symetrické“ tyristory, v zahraniční literatuře triak) mohou pracovat na střídavý proud, proto jsou regulační obvody s nimi velmi jednoduché a rozšířily se.
Jak je známo, tyristorový regulátor se stejným řídicím obvodem lze použít se zátěžemi různého výkonu. V závislosti na výkonu zátěže se volí typ tyristoru a diod a také rozměry radiátorů. Proto bylo rozhodnuto poskytnout možnost instalace nízkopříkonového tyristoru a diod na jednu desku plošných spojů s řídicím obvodem při práci s nízkopříkonovou zátěží. Pokud je nutné pracovat s velkým výkonem (do 1 kW), lze tyristor instalovat mimo desku na radiátor.
Jak je známo, při práci na indukční zátěži by měl mít tyristor co nejnižší přídržný proud. Z hojně používaných tyristorů byl zvolen KU208G, protože má dostatečně vysoké dovolené napětí (400 V) a dostatečně nízký přídržný proud (100 mA). Přestože je KU208 triak, používá se jako běžný tyristor. Tyristory totiž nejsou absolutně symetrická zařízení, takže za nepříznivých okolností může regulátor začít pracovat v režimu jedné půlperiody. Protože zátěží vyvinutého regulátoru může být transformátor nebo elektromotor, je režim s jednou půlperiodou nepřijatelný.
2.4. Schéma regulátoru
Na základě výše uvedených úvah bylo vypracováno schéma regulátoru (viz obr. 1).
Síťové napětí je usměrněno diodovým můstkem VD 1- VD 4. Rezistory R 1- R 3 a zenerovy diody VD 5- VD 7 tvoří stabilizátor výkonu pro řídicí obvod. V bodě „a“ jsou získány lichoběžníkové napěťové impulsy s amplitudou asi 20 V. Řídicí obvod je sestaven na tranzistorech VT 1 a VT 2. Časovací kondenzátor C 4 se nabíjí přes proměnný rezistor (instalovaný mimo desku) a rezistor R 1. Když napětí na C 1 překročí napětí na přechodu R 6 a R 7, tranzistor VT 1 se otevře svým kolektorovým proudem VT, otevře se tedy tranzistor VT2 proudem kolektoru VT2. lavinovitě otevřete a vybijte kondenzátor C1 přes diodu VD 1 a rezistor R 8 do řídící elektrody tyristoru. Rezistor R 8 omezuje proud řídicí elektrody tyristoru. Dioda VD 8 zabraňuje tyristoru ovlivňovat činnost regulačního obvodu. Rezistor R 8 zabraňuje samovolnému spuštění tyristoru. Rezistor R 9 snižuje vliv rušení na řídicí obvod.
Pro dálkové ovládání je k bodům „a“ a „b“ připojen optočlen VU 1 s pomocnými prvky. Řídicí napětí je přivedeno na svorky CNT – a CNT +1, v tomto případě odpor R 10 omezuje proud LED optočlenu. Pokud je modul SCR 3 M 0 řízen ze zdroje proudu, použijí se svorky CNT – a CNT +2.
Rezistor R 11 určuje citlivost optočlenu. Dioda VD 9 zabraňuje vzniku zpětného napětí na fototranzistoru optočlenu.
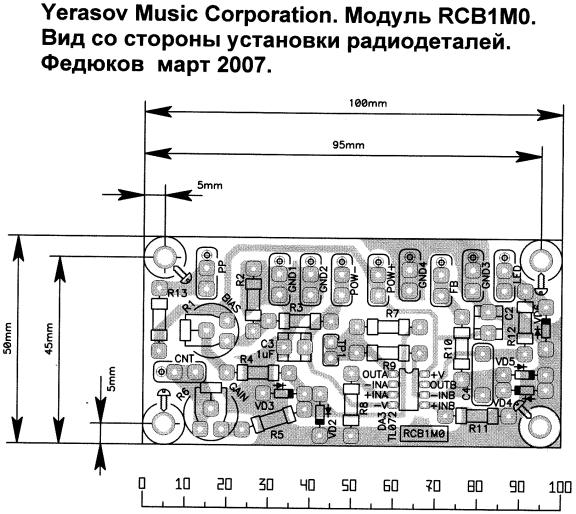
2.5. PCB. Pro regulátor výkonu byla navržena deska s plošnými spoji (viz obr. 2). Deska byla vyvinuta pomocí programu PCAD.
Ve střední části desky jsou prvky tyristorového řídicího obvodu. Na jednu hranu lze nainstalovat tyristor (bez radiátoru nebo s malým radiátorem). Na druhý konec lze nainstalovat optočlen. Šířka desky je 50 mm. Délka bez optočlenu a tyristoru – 120 mm. S optočlenem a tyristorem je délka desky 160 mm.
3. Sada modulů RCB 1 M 0 a CVB 1 M 0 pro správu napájení. Tato sada modulů je určena k ovládání různých zdrojů energie. Byly vyvinuty dvě takové sady: jedna pro zdroj +5…15 V a druhá pro zdroj 0…+400 V. U napájecích zdrojů s různým napětím se liší pouze jmenovité hodnoty komponent modulu RCB 1 M 0.
Uvažujme schéma řídicího modulu regulátoru RCB 1 M 0 (viz obr. 3).
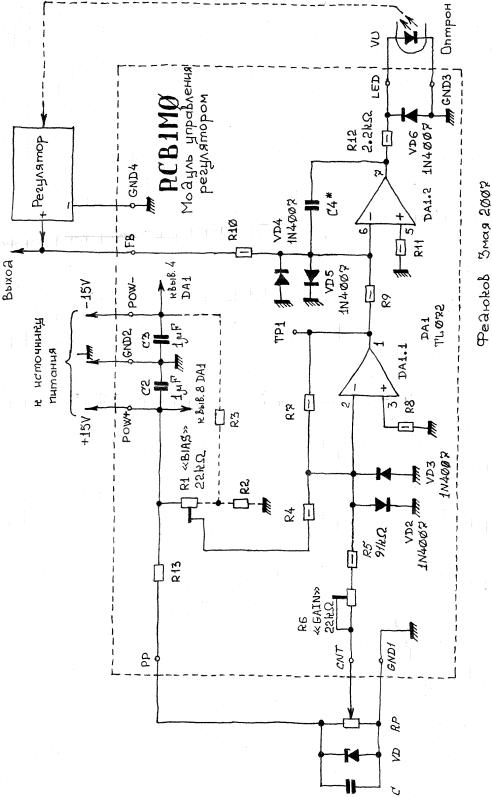
Obvod využívá jeden mikroobvod DA 1 typu TL 072 (duální diferenciální zesilovač). Obvod se skládá ze dvou stupňů: součtový invertující zesilovač na DA 1.1 a srovnávací zařízení na DA 1.2.
Pro řízení výstupního napětí regulátoru je na vstup CNT modulu RCB 1 M 0 přivedeno řídicí napětí. Přes odpory R 5 a R 6 je vstupní signál přiváděn na invertující vstup 2 mikroobvodu DA 1 Přes odpor R 7 je DA 1.1 pokryt zápornou zpětnou vazbou. Citlivost obvodu na řídicí napětí na vstupu CNT se nastavuje pomocí trimrového rezistoru R 6.
Protože je někdy požadováno, aby bylo na výstupu regulátoru s nulovým vstupním napětím získáno nenulové napětí, lze na vstup 2 DA 1.1 přivést offset také z rezistorů R 1 – R 4. Rezistor R 1 slouží k nastavení offsetu (napětí na výstupu regulátoru s nulovým napětím na vstupu CNT). Pokud odsazení není požadováno, prvky R 1- R 4 se neinstalují.
Diody VD 2 a VD 3 slouží k ochraně zesilovače DA 1.1 před poruchou při náhodném přivedení nepřijatelně vysokého napětí na vstup modulu. Rezistor R 9 je nutný pro vyrovnání předpětí na vstupech 2 a 3 mikroobvodu DA 1.1, tedy pro snížení nulového driftu součtového zesilovače. Sumární zesilovač na mikroobvodu DA 1.1 je invertující, to znamená, že když je na vstup přivedeno kladné napětí, výstupní napětí bude záporné. Výstupní napětí součtového zesilovače lze zkontrolovat v testovacím bodě TP 1.
Druhý zesilovač mikroobvodu DA 1 obsahuje srovnávací obvod. Na vstup 6 tohoto zesilovače je přiváděn proud úměrný kladnému výstupnímu napětí regulátoru přes rezistor R10 a proud úměrný zápornému výstupnímu napětí součtového zesilovače na DA 9 je přiváděn přes rezistor R1.1. Rozdíl proudů rezistorů R 9 a R 10 odpovídá odchylce výstupního napětí od hodnoty určené vstupním signálem modulu (pin CNT). LED optočlenu, který ovládá regulátor napětí, je připojena k výstupu 7 zesilovače DA 1.2. Všimněte si, že regulátor je navržen tak, že když se zvýší proud procházející LED optočlenem, zvýší se výstupní napětí regulátoru.
Pokud se např. z nějakého důvodu zvýší výstupní napětí regulátoru, objeví se na vstupu 6 zesilovače DA 1.2 kladné napětí. Protože signál přivedený na vstup 6 DA 1.2 je invertovaný, napětí na výstupu 7 zesilovače se sníží, proud procházející LED se sníží a výstupní napětí regulátoru se sníží, to znamená, že se dostane do souladu se vstupním řídicím signálem modulu (pin CNT).
Diody VD 4 a VD 5 chrání vstup 6 mikroobvodu před poškozením v důsledku náhodného použití nepřijatelně vysokého napětí. Rezistor R 12 slouží k omezení proudu procházejícího LED. Dioda VD 6 zabraňuje výskytu zpětného napětí na LED. Kondenzátory C2 a C3 potlačují rušení v napájecích obvodech mikroobvodu DA1.
Rezistor R 13 lze instalovat, pokud je potřeba instalovat zenerovu diodu VD mimo modul paralelně s odporem potenciometru RP pro stabilizaci řídicího napětí. Potenciometr je napájen přes PP výstup modulu RCB 1 M 0 U vyráběných modulů RCB 1 M 0 jsou místo R 13 připájeny propojky, protože stabilizátory řídicího napětí jsou osazeny na samostatných deskách plošných spojů. Kondenzátor C 1 je zvolen pro eliminaci parazitních oscilací v systému automatického řízení.
Byly vyrobeny dva moduly RCB 1 M 0 lišící se jmenovitými hodnotami instalovaných dílů. Tyto změny lze shrnout do tabulky:
Provedení 1 Provedení 2
(U out od +5 V do +15 V) (U out od 0 do +400 V)
Chybí potenciometr R 1 22 kΩ
Chybí propojka R 2
R 4 330 k Ω chybí
R 7 100 kΩ 100 kΩ
R 8 47 kΩ 47 kΩ
R 9 5.1 kΩ 5.1 kΩ
R 10 10 k Ω 390 k W = 3*130 k W na desce regulátoru
R 11 3.3 kΩ 5.1 kΩ
U obou verzí modulu RCB 1 M 0 je vstupní napětí od nuly do +5 V, vstupní odpor je 100 k Ω.
Ovládací prvky výstupního napětí stabilizátorů jsou instalovány na modulech ovládacího napětí CVB 1 M 0. Schéma modulu CVB 1 M 0 (stejné pro zdroje +5…+15 V a 0…+400 V) je na Obr. 5.
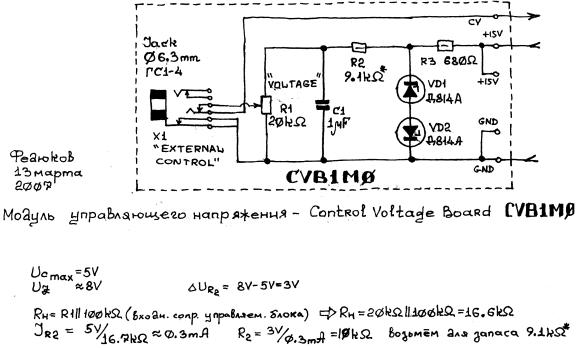
Modul CVB 1 M 0 umožňuje ruční nebo dálkové ovládání napájecího zdroje. Modul CVB 1 M 0 obsahuje stabilizátor napětí, potenciometr a patici s přepínacími kontakty.
Zenerovy diody VD 1, VD 2 a rezistor R 3 tvoří parametrický stabilizátor napětí. Zenerova dioda VD 2, zapojená v propustném směru, kompenzuje nárůst napětí zenerovy diody VD 1 s rostoucí teplotou.
Rezistor R 2 je zapojen do série s potenciometrem R 1 tak, že když je jezdec potenciometru v horní poloze dle schématu, výstupní napětí modulu (vývod CV) je cca 5V.
Potenciometr R 1 slouží k ručnímu ovládání napájecího zdroje.
V režimu dálkového ovládání, tedy po zasunutí zástrčky do zásuvky X 1 „External Control“, se motor potenciometru vypne a napětí dálkového ovládání (od nuly do +5 V) je přivedeno na výstup modulu CV přes zástrčku.
Během dokončování své ročníkové práce jsem se hluboce seznámil s návrhem desek plošných spojů pro elektronická zařízení a technologií výroby desek plošných spojů metodou „laser iron“.