Programování robotů: jazyky a metody programování robotiky

Robot je technika, která provádí lidské příkazy pomocí nahraného softwaru. Chytré stroje se používají v různých oblastech: v průmyslu, medicíně, každodenním životě, stavebnictví, vesmíru a dalších oblastech. Provádějí komplexní práci, která vyžaduje velkou sílu nebo vysokou přesnost, což člověku usnadňuje práci a umožňuje mu další rozvoj. Pojďme se podívat na to, co potřebujete vědět pro programování, jaké úrovně a jazyky jsou k dispozici a kde se používá robotický software.
Strojový kód a potřeba programovacích jazyků
Veškerá robotika rozumí příkazům ve svém vlastním jazyce, což je strojový kód sestávající ze znaků binárního systému. Každá technika používá svůj vlastní strojový jazyk. Pro člověka je téměř nemožné tomu porozumět, protože je velmi složitý. V tomto ohledu je program pro roboty napsán pomocí jiných strojových kódů, které jsou pro člověka jednoduché. Jak potom robot rozumí softwaru, který je v něm vložený? To se děje podle následujícího schématu:
- Specialista sestaví akční algoritmus pro robota v programovacím jazyce, aby zařízení provedlo přiřazené akce.
- Tento algoritmus jde do „překladače“, který jej převede do strojových kódů. Nejčastěji se používají kompilátory, které převádějí algoritmus do binárního kódu v jediném souboru. Existují také překladatelé, kteří také transformují algoritmus do jazyka srozumitelného pro robota a tlumočníky, překládají kód postupně, řádek po řádku. Výběr překladatele závisí na jazyku.
- Z „překladače“ program vstupuje do „mozku“ technologie ve formě, která je pro něj srozumitelná. „Mozkem“ robota může být čip, obvod nebo počítač.
Abychom lépe pochopili, jak obvod funguje, uveďme příklad. Ruština je kompilovaný algoritmus, francouzština je binární systém a překladač je kompilátor. Ukazuje se, že mluvený výraz v ruštině jde do „překladače“ a odtud vychází fráze ve francouzštině, která je pro Francouze srozumitelná.
<img src=”https://educube.ru/upload/webp/medialibrary/3a5/x304127s8vf3fs9dr53gmxipcw82maxc.webp” />
Nízkoúrovňové a vysokoúrovňové programovací jazyky
Aby robot mohl vykonávat funkce, pro které byl vytvořen, je do jeho „mozku“ nahrán příslušný software. Protože technologie nerozpoznává lidskou řeč, používají se specializované strojové šifry. V současné době existuje více než 100 programovacích jazyků pro roboty, které se konvenčně dělí na nízkoúrovňové a vysokoúrovňové.
Byly vytvořeny v padesátých letech dvacátého století, aby usnadnily proces kompilace softwaru. Nízkoúrovňové dnes neztratily svůj význam. Používají se k ovládání strojů, které pracují pod přísnou kontrolou a provádějí jednoduché úkoly.
Jazyk má nevýhody – pro technologii různých konstrukcí je třeba vytvořit různé programy, aby mohly vykonávat stejné funkce (například uchopení kybernetické paže a robota bagru rukou), a pokud při vytváření algoritmu došlo k chybě , je velmi obtížné (téměř nemožné) jej odhalit. Mezi výhody patří vysoký výkon robotů a nízká hmotnost softwaru.
Nízkoúrovňové se dělí na strojní a montážní:
- Stroj. Je to binární jazyk složený z jedniček a nul. Je velmi obtížné vytvořit takový program, protože se můžete rychle zmást. V tomto ohledu se používá zřídka. Výhodou této metody programování robotů je, že při použití algoritmu není potřeba „překladač“. Algoritmus zároveň zabírá málo paměti a stroj provádí akce s vysokou přesností.
- Assembler. Při programování se používá nejen binární systém, ale také anglická písmena, která jsou obdobou zkrácených slov. Při programování v assembleru robot také provádí všechny akce s vysokou přesností, je však nutné použít „překladač“.
Který nízkoúrovňový jazyk se má použít, se vybírá s ohledem na to, jaký program je třeba nainstalovat do robota a kolik má paměti.
Týkají se moderního programování. Mezi výhody jazyka patří snadná kompilace algoritmu, který je vhodný pro roboty různých značek, a také pokud došlo k chybě v programování, lze ji snadno najít a opravit. Nevýhodou takového jazyka je jeho velká hmotnost, vyžaduje tedy vybavení s velkým množstvím paměti a ke spuštění se používá „překladač“ další nevýhodou je nízká přesnost provádění příkazů (přerušení provozu nebo délka; čas potřebný k načtení programu).
Seznam jazyků na vysoké úrovni zahrnuje:
- imperativ;
- předmětově zaměřený;
- objektově orientovaný.
Každou z nich podrobněji zvážíme v dalším odstavci. Dále uvádíme výhody a nevýhody programovacího jazyka robotů na vysoké úrovni.
Kromě nízké a vysoké úrovně existují manipulační a operativní úrovně. V prvním případě stroj provádí úkol od začátku do konce sám. Například zvedání nákladu a jeho přesun do auta. Na druhé úrovni zařízení provádí příkazy zadané operátorem a provádí je postupně. Zvažme podobný příklad. Na první příkaz zařízení uchopí břemeno, poté jej zvedne, třetí příkaz přesune břemeno ke stroji a poslední příkaz uvolní břemeno a ponechá jej ve stroji.
<img src=”https://educube.ru/upload/webp/medialibrary/e47/3fym8zt6h1ryszjfm3t51iyf24tupj1t.webp” />
Základní programovací jazyky v robotice
Jak již bylo zjištěno, bylo vyvinuto více než 100 programovacích jazyků pro roboty, zvažme ty nejoblíbenější:
- Jáva. Používá se k vytváření aplikací na jakékoli platformě. V robotice se používá k vývoji algoritmů pro řízení složitých zařízení. Používá se také při výuce programování robotů. Hlavní výhody Javy jsou v tom, že kódy jsou vhodné pro zařízení s různým designem a Java má také velké množství nástrojů pro tvorbu webových stránek, internetových obchodů atp. Nevýhodou je nízký výkon.
- MATLAB. Programovací jazyk se používá k vytváření algoritmů pro matematické výpočty. V robotice se MATLAB používá k vytváření programů pro modelování a analýzu informací a také pro řízení signálů. Díky přítomnosti výkonných nástrojů je vhodný pro matematická řešení vysoké složitosti. MATLAB se integruje s jakýmkoli hardwarem a je vhodný pro programování složitých systémů. S jeho pomocí bylo vyvinuto mnoho algoritmů pro roboty. Nevýhodou je vysoká cena za licenci.
- Krajta. Jeden z populárních programovacích jazyků. Jeho hlavní výhodou je snadné učení a sestavení algoritmu akcí, takže se doporučuje pro začátečníky a je také vhodný pro všechny platformy a umožňuje vyrábět levné, ale produktivní roboty. Jazyk se používá k psaní skriptů, ovládání senzorů a programů pro školení (například robotika), testování nebo vývoj nových technologií. Nevýhodou je nízký výkon.
- C a C++. Nejvýkonnější programovací jazyk pro roboty s vysokým výkonem a řízením zdrojů. V robotice se s využitím jazyka C++ používají nízkoúrovňové technologie, se kterými stroj provádí akce s vysokou přesností a účinností. Jazyk píše kódy, které umožňují maximálně využít programové prostředky, což je u technologie s nízkým výpočetním výkonem nezbytné. C++ se používá k vytváření ovladačů a vestavěných aplikací. Nevýhodou je, že se obtížně používá. Rozdíl mezi C a C++ je v tom, že první je základem a druhý je vylepšený jazyk C.
- Poškrábat. Oblíbené u začátečníků ve věku 8-16 let (využívá se v kroužcích robotiky). Při sestavování programu se bloky spojují přetažením.
- C#. jazyk Microsoft. Používá se k vytváření neuronových sítí v robotice.
- Pascal. Nejstarší programovací jazyk, při psaní algoritmů pro roboty se používá jen zřídka. Jeho výhodou je snadné programování. Vhodné pro začátečníky, kteří nejsou obeznámeni s algoritmy jako úvod do programování.
- LISP. Jeden z prvních programovacích jazyků. Používá se zřídka, ale používá se při vytváření umělé inteligence a ROS. Nevýhodou je, že se obtížně používá.
Kromě programovacích jazyků existují frameworky – sada nástrojů pro tvorbu webových stránek a programů pro roboty. Nejoblíbenější z nich je ROS (v překladu robotické operační systémy). Urychluje proces zápisu algoritmů díky dostupnosti hotových balíčků. Framework podporuje jazyky C++ a Python. Nevýhodou je, že se obtížně používá.
Role vývojového prostředí a hardwaru
Při programování robotů je třeba počítat s tím, že existuje nejen mnoho jazyků, ale i prostředí, která se dělí na dvě základní skupiny: vizuální – používají se grafické obrázky a testovací – algoritmus je kompilován do textových souborů. Softwarová prostředí se také dělí podle univerzálnosti, to znamená, že jsou vhodná pro roboty pouze s jedním designem nebo s jiným. Dále se podívejme na oblíbené typy programovacích prostředí:
- NXT-G. Vizuální prostředí, ve kterém se řídicí program skládá z vývojových diagramů. V jakém pořadí jsou umístěny, technika provádí akce. Byl vyvinut společností Lego speciálně pro robotickou stavebnici Mindstorms NXT. Prostředí se vyznačuje jednoduchým a intuitivním rozhraním a je kombinováno s platformou ev3.
- TrikStudio. Kombinované prostředí, používá textové soubory a grafické obrázky. Používá se k testování zařízení od Trik.
- MRDS. Vizuální prostředí skládající se z programovacího jazyka VPL, který se stále častěji používá k výuce začátečníků programovat roboty. Specialisté jsou profesionálové a používají primárně jazyk C#. Při sestavování algoritmu se vyberou grafické obrázky a vytvoří se mezi nimi spojení.
- RobotC. Textové prostředí je považováno za jeden z nejlepších způsobů programování robotů pro začátečníky. Používá se při přípravě na turnaje v této oblasti. Při tvorbě algoritmu je použit jazyk C, který je uznáván jako nejjednodušší, nevýhodou prostředí je placený software.
- BricxCC. Textové prostředí, které používá k programování jazyk NXC. Vyniká přítomností velkého množství nástrojů a možností používat bloky Lego Mindstorms. Při sestavování algoritmů existují nízkoúrovňové a vysokoúrovňové programovací jazyky, které vám umožňují vyvíjet algoritmy pro roboty pro různé účely.
- Arduino. Textové prostředí slouží nejen k programování robotů, ale také k blikání kódů ovladačů. Vyniká jednoduchým rozhraním, srozumitelným i pro začátečníky.
Při výběru prostředí a programovacího jazyka se berou v úvahu hlavní kritéria, z nichž prvním je rychlost akcí robota po nahrání algoritmu do něj a velikost jeho paměti. Pokud je potřeba vysoká rychlost a zařízení má malou paměť, pak se používají jazyky nízké úrovně, v případě, že robot musí provádět mnoho různých příkazů, pak se používají jazyky vysoké úrovně.
Bere také v úvahu, kolik času je věnováno vytvoření programu. Při kompilaci algoritmu pomocí nízkoúrovňových jazyků to zabere spoustu času, a pokud dojde k chybě, bude velmi obtížné ji najít. Při použití jazyků na vysoké úrovni zabere programování málo času, ale je třeba vzít v úvahu, že rychlost provádění příkazů robotem může být pomalejší, protože při používání jazyků na vysoké úrovni se používá „překladač“, takže data zpracování zabere čas. Robot může zamrznout a někdy dochází k problémům s plněním úkolů.
Volbu jazyka ovlivňuje i to, na koho je naprogramovaný robot zaměřen. Jeho úkolem může být práce s vybavením nebo lidmi. Ve druhém případě jsou algoritmy složitější, protože je potřeba grafika (zařízení komunikuje s osobou pomocí obrázků, například zobrazuje obrázek nebo text na monitoru) a grafika se skládá ze složitých a objemných programů.
Dalším kritériem je požadovaná všestrannost programování. Je určen pro roboty stejné konstrukce od jednoho výrobce nebo pro různá zařízení od různých firem. V prvním případě se používají jazyky nízké úrovně a ve druhém jazyky vysoké úrovně.
A posledním parametrem pro výběr programovacího jazyka je, jak rychle lze provádět změny a jakou rychlostí probíhá testování. Pro roboty, které jsou neustále aktualizovány, vyberte jazyky, ve kterých lze rychle provádět změny a poté je testovat vysokou rychlostí. Patří mezi ně ty na vysoké úrovni.
Podle uvažovaných kritérií a prostředí je nejoblíbenějším nízkoúrovňovým jazykem assembler a pro jazyky vysoké úrovně je to C++.
<img src=”https://educube.ru/upload/webp/medialibrary/199/s9p27y8hn64mwqe415q5v35huqd0dudq.webp” />
Praktická aplikace jazyků v robotice
Uvažované softwarové jazyky a prostředí se používají k vytvoření následujících typů robotů:
- Umělá inteligence, která je v současné době široce rozvíjena. Pomáhá technologii rozhodovat se nezávisle, učit se a rychle se přizpůsobovat.
- Počítačové vidění. Tento program umožňuje robotům vidět, rozpoznávat předměty a detekovat emoce. Toho je dosaženo pomocí vestavěných kamer a senzorů.
- Řeč. Nové modely robotů lze komunikovat bez zadávání příkazů prostřednictvím počítače, rozumí řeči, což usnadňuje jejich ovládání.
- Vnímání vnějšího světa. Nové modely jsou vybaveny senzory, které jim pomáhají hmatově rozpoznat svět prostřednictvím senzorů. Díky tomu může technologie provádět složité příkazy.
Existují také jednoduché modely, například průmyslové, lékařské, domácí atd. Jejich hlavní rozdíl od uvažovaných příkladů je v tom, že vykonávají práci po obdržení příkazu z počítače, který zadá operátor.
Školení programování robotů
Kurzy a lekce o vytváření algoritmu akcí se provádějí podle plánu, který závisí na technologii, pro kterou je vytvořen, takže existuje mnoho metod výuky, ale existují obecná doporučení. Odborníci radí, abyste si při kompilaci kódů vytvořili vlastní knihovnu, ve které budou uloženy často používané nástroje. To v budoucnu výrazně ušetří čas.
Po zkompilování strojového kódu zanechte poznámky o jeho účelu. A po jeho dokončení napište nový text. V budoucnu vám to pomůže rychle najít chybu, pokud dojde k selhání. Po dokončení programu se před zapnutím naprogramovaného robota ujistěte, že tlačítko pro jeho vypnutí je v dosahu, takže v případě chyby v programu lze zařízení rychle vypnout, než se samo poškodí.
Abyste se plně naučili programování, potřebujete nejen počítač s oblíbenými jazyky pro vytváření algoritmů, ale také vybavení. Společnost educube 3 nabízí ke koupi stavebnice pro programování robotů. Stránka představuje širokou škálu originálních produktů Lego pro začátečníky všech věkových kategorií. Nákup robotů je jednoduchý – vyberte produkt, přidejte jej do košíku a poté za něj zaplatíte (zákazníci z Moskvy mohou provést platbu po obdržení objednávky od kurýra) jakýmkoli bezhotovostním způsobem. Dále vaši objednávku doručíme kamkoli v Rusku. Pokud se vyskytnou nějaké potíže, manažer zodpoví všechny otázky.
Zdroje:
- Arkhipova TV Programování robotů.
- Katyshkov R.S., Misko N.V. Programování robotů. – 2023.
- Ponarina A. A. Programování robotů. – 2023.

![]()
Úvod:
Ve druhé lekci se blíže seznámíme s programovacím prostředím a podrobně si prostudujeme příkazy, které nastavují pohyb našeho robotického vozíku, sestaveného v první lekci. Spusťte tedy programovací prostředí Lego mindstorms EV3, načtěte náš dříve vytvořený projekt Less.ev3 a přidejte do projektu nový program – lekci-2-1. Program lze přidat dvěma způsoby:
- Vyberte tým “Soubor” – “Přidat program” (Ctrl+N).
- Klikněte na “+” na záložce programy.

Obr. 1
2.1. Programovací palety a programové bloky
Obraťme nyní svou pozornost na spodní sekci programovacího prostředí. Z materiálu první lekce již víme, že zde jsou příkazy pro programování robota. Vývojáři použili originální techniku a po seskupení softwarových bloků přiřadili každé skupině vlastní barvu a nazvali palety skupin.
Zelená paleta se nazývá: “Akce”:

Obr. 2
Tato paleta obsahuje softwarové bloky pro ovládání motorů, blok pro zobrazení dat na obrazovce a blok pro ovládání indikátoru stavu modulu. Nyní začneme studovat tyto softwarové bloky.
2.2. Zelená paleta – akční bloky
První softwarový blok zelené palety je určen pro ovládání středního motoru, druhý blok je určen pro ovládání velkého motoru. Protože parametry těchto bloků jsou totožné, uvažujme nastavení na příkladu bloku – velkého motoru.

Obr. 3
Pro správnou konfiguraci řídicí jednotky velkého motoru musíme:
- Vyberte port, ke kterému je připojen motor (A, B, C nebo D) (obr. 3 poz. 1)
- Vyberte provozní režim motoru (obr. 3 položka 2)
- Nakonfigurujte parametry zvoleného režimu (obr. 3 položka 3)
Jak se liší režimy? režim: “Zapnout” zapne motor s daným parametrem “Moc” a poté se toto řízení přenese do dalšího programového bloku. Motor se bude točit, dokud jej nezastaví další blok. “Velký motor” s režimem “Vypnout” nebo další blok “Velký motor” nebude obsahovat žádné další parametry provedení. Režim “Zapnout na sekundy” zapne velký motor s nastaveným výkonem na určený počet sekund a teprve po uplynutí času se motor zastaví a řízení v programu přejde na další blok programu. Podobně se bude motor chovat v režimech “Zapnout podle počtu stupňů” и “Zapnout pro počet otáček”: teprve poté, co motor dokončí nastavenou rotaci, se zastaví a řízení programu se přesune na další blok.
Parametr výkonu (na obr. 3 je výkon nastaven na 75) může nabývat hodnot od -100 do 100. Kladné hodnoty výkonu nastavují otáčení motoru ve směru hodinových ručiček, záporné – proti směru hodinových ručiček. Pokud je hodnota výkonu 0, motor se nebude otáčet, čím „vyšší“ hodnota výkonu, tím rychleji se motor otáčí.
Parametr výkonu je nastaven pouze celočíselnými hodnotami, parametry: sekundy, stupně, otáčky mohou nabývat hodnot s desetinným zlomkem. Je však třeba mít na paměti, že minimální krok otáčení motoru je roven jednomu stupni.
Parametr by měl být uveden samostatně. “Brzda na konci”. Tento parametr, pokud je nastaven na hodnotu “Brzda” aktivuje motorovou brzdu po provedení příkazu a pokud je nastaveno na “Obsadit”, pak se motor bude otáčet setrvačností, dokud se sám nezastaví.
Další dva softwarové bloky “Řízení” и “Nezávislé ovládání motoru” implementovat ovládání dvojice velkých motorů. Standardně je k portu připojen levý velký motor “V”, a ten pravý – do přístavu “Z”. Ale můžete změnit připojovací porty v nastavení bloku v souladu s požadavky vašeho návrhu (Rýže. 4 poz. 1).

Obr. 4
Parametr “Řízení” (Rýže. 4 poz. 2) může nabývat hodnot od -100 do 100. Záporné hodnoty parametru způsobí, že se robot otočí doleva, s hodnotou 0 se robot pohybuje rovně a kladné hodnoty způsobí, že se robot otočí doprava. Šipka nad číselným parametrem mění svou orientaci v závislosti na hodnotě a ukazuje tak směr pohybu robota (Obr. 5).

Obr. 5
Blok programu “Nezávislé ovládání motoru” vypadá jako softwarový blok “Řízení”. Řídí také dva velké motory, pouze místo parametru “Řízení” je možné nezávisle řídit výkon každého motoru. Se stejnou hodnotou parametru “Moc” pro levý a pravý motor se bude robot pohybovat přímočaře. Pokud použijete zápornou hodnotu výkonu (například -50) na jeden motor a kladnou hodnotu (například 50) na druhý, robot se na místě otočí (Obr. 6).

Obr. 6
Provozní režimy těchto jednotek jsou podobné režimům jednomotorové řídicí jednotky, není tedy potřeba žádný další popis.
2.3. Přímý pohyb, zatáčky, zatáčky, dorazy
Nyní tedy můžeme napsat program, aby se robot pohyboval po jakékoli trase.
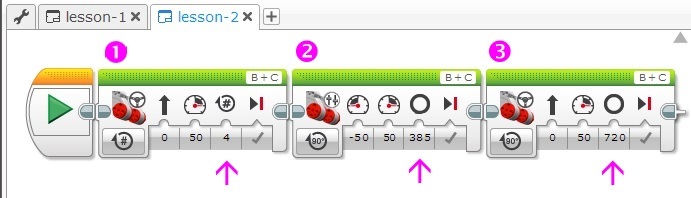
Úkol 1: Jeďte rovně na 4 otáčky motoru. Otočte se. Jeďte o 720 stupňů.
Řešení (Obr. 7):
- Pomocí softwarového bloku “Řízení” jeďte 4 otáčky vpřed.
- Pomocí softwarového bloku “Independent Motor Control” otočte na místě (hodnotu stupňů bude nutné zvolit experimentálně).
- Pomocí softwarového bloku “Řízení” jeďte vpřed o 720 stupňů.
Poznámka: Proč jsem musel při otáčení volit hodnotu stupňů blok 2? Není to tak? 360 stupně je požadovaná hodnota? Ne, pokud nastavíme hodnotu parametru “stupně” stejný 360, pak tím přinutíme hřídele levého a pravého motoru našeho robota otočit o požadovanou hodnotu. Úhel, pod kterým se robot otáčí kolem své osy, závisí na velikosti (průměru) kol a vzdálenosti mezi nimi. Na Obr. 7 hodnota parametru “stupně” rovná se 385. Tuto hodnotu umožňuje robot, sestavený podle návodu malý robot 45544 otočit kolem své osy. Pokud máte jiného robota, budete muset vybrat jinou hodnotu. Je možné tuto hodnotu zjistit matematicky? Je to možné, ale o tom si povíme později.
Obr. 7
Úkol 2: Umístěte nějakou překážku (sklenici, kostku, malou krabičku) na rovný povrch a označte výchozí bod vašeho robota. Vytvořte v projektu nový program: lekce-2-2, který umožní robotovi obejít překážku a vrátit se do výchozího bodu.
Kolik softwarových bloků jste použili? Podělte se o svůj úspěch v komentářích k lekci.
2.4. Obrazovka, zvuk, indikátor stavu modulu
Blok programu “Obrazovka” Umožňuje zobrazit textové nebo grafické informace na LCD obrazovce bloku EV3. Jaké praktické využití by to mohlo mít? Za prvé, ve fázi programování a ladění programu je možné zobrazit aktuální hodnoty senzorů na obrazovce, když je robot v provozu. Za druhé můžete na obrazovce zobrazit názvy mezistupňů provádění programu. A za třetí, pomocí grafických obrázků můžete „oživit“ obrazovku robota, například pomocí animace.

Obr. 8
Blok programu “Obrazovka” má čtyři provozní režimy: režim “text” umožňuje zobrazit textový řetězec na obrazovce, režim “tvary” umožňuje zobrazit na obrazovce jeden ze čtyř geometrických tvarů (čára, kruh, obdélník, bod), režim “Obraz” může zobrazit jeden obrázek na obrazovce. Můžete si vybrat obrázek z bohaté sbírky obrázků nebo si nakreslit vlastní pomocí editoru obrázků. Režim “Okno resetovat nastavení” resetuje obrazovku EV3 Brick na standardní informační obrazovku zobrazenou za běhu programu.

Obr. 9
Podívejme se na parametry softwarového bloku “Obrazovka” v režimu “text” (Obr. 9 položka 1). Řádek určený k zobrazení na obrazovce se zadává do speciálního pole. (obr. 9 položka 2). Bohužel pole pro zadávání textu přijímá pouze latinská písmena, čísla a interpunkční znaménka. Pokud je režim “Vymazat obrazovku” nastavit na hodnotu “Skutečný”, pak bude obrazovka před zobrazením informací vymazána. Pokud tedy potřebujete zkombinovat aktuální výstup s informacemi již na obrazovce, nastavte tento režim na “Lhát”. Režimy “X” и “A” určit bod na obrazovce, od kterého začíná výstup informací. Obrazovka EV3 Brick je 178 pixelů (bodů) široká a 128 pixelů vysoká. Režim “X” může nabývat hodnot od 0 do 177, režim “A” může nabývat hodnot od 0 do 127. Levý horní bod má souřadnice (0, 0), pravý dolní (177, 127)

Obr. 10
Během nastavování softwarového bloku “Obrazovka” můžete povolit režim náhledu (obr. 9 položka 3) a vizuálně vyhodnotit výsledek nastavení výstupu informací.
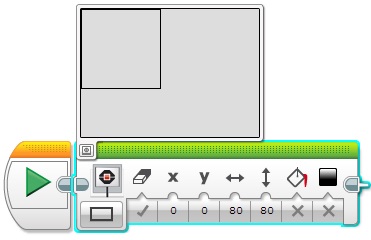
režim “Obrázky” (obr. 11 poz. 1) nastavení softwarového bloku se mění v závislosti na typu figurky. Takže při zobrazení kruhu budete muset zadat souřadnice “X” и “A” střed kruhu, stejně jako hodnotu “Poloměr”. Parametr „Naplnit“ (obr. 11 poz. 2) odpovídá za to, zda se zobrazí buď obrys postavy, nebo bude vnitřní plocha postavy vyplněna barvou uvedenou v parametru “Barva” (obr. 11 poz. 3).

Obr. 11
Chcete-li zobrazit přímku, musíte určit souřadnice dvou krajních bodů, mezi kterými se přímka nachází.

Obr. 12
Chcete-li zobrazit obdélník, musíte zadat souřadnice “X” и “A” levý horní roh obdélníku, stejně jako jeho “Šířka” и “Výška”.
Obr. 13
Nejjednodušší způsob, jak zobrazit bod, je! Stačí uvést jeho souřadnice “X” и “A”.
režim “Obraz”, asi nejzajímavější a nejpoužívanější režim. Umožňuje zobrazovat obrázky na obrazovce. Programovací prostředí obsahuje obrovskou knihovnu obrázků, roztříděných do kategorií. Kromě existujících obrázků si můžete vždy vytvořit svůj vlastní výkres a vložením do projektu jej zobrazit na obrazovce. (Hlavní nabídka programovacího prostředí – Nástroje – Editor obrázků). Při vytváření obrázku můžete na obrazovce zobrazit také symboly ruské abecedy.

Obr. 14
Jak vidíte, programovací prostředí přikládá velký význam zobrazení informací na obrazovce EV3 Main Brick. Podívejme se na další důležitý softwarový blok “Zvuk”. Pomocí tohoto bloku můžeme vydávat zvukové soubory, tóny libovolné délky a frekvence, stejně jako hudební noty do vestavěného reproduktoru bloku EV3. Podívejme se na nastavení softwarového bloku v režimu “Přehrát tón” (Obr. 15). V tomto režimu je potřeba nastavit “Frekvence” tóny (obr. 15 položka 1), “Trvání” zazní během sekund (obr. 15 položka 2), stejně jako hlasitost zvuku (obr. 15 položka 3).

Obr. 15
režim “Přehrát poznámku” Namísto frekvence tónu musíte vybrat notu na virtuální klávesnici a také nastavit dobu trvání zvuku a hlasitost (Obr. 16).

Obr. 16
režim “Přehrát soubor” můžete si vybrat jeden ze zvukových souborů z knihovny (obr. 17 položka 1)nebo připojením mikrofonu k počítači pomocí Editoru zvuku (Hlavní menu programovacího prostředí – Nástroje – Zvukový editor) nahrajte svůj vlastní zvukový soubor a zahrňte jej do projektu.

Obr. 17
Podívejme se na parametr samostatně “Typ přehrávání” (obr. 17 poz. 2), společný pro všechny režimy softwarového bloku “Zvuk”. Pokud je tento parametr nastaven na “Počkejte na dokončení”, pak se ovládání přenese do dalšího programového bloku až po úplném přehrání zvuku nebo zvukového souboru. Pokud je nastavena jedna z následujících dvou hodnot, zvuk se začne přehrávat a ovládání programu přejde na další programový blok, pouze zvuk nebo zvukový soubor se přehraje jednou nebo se bude opakovat, dokud nebude zastaven jiným programovým blokem “Zvuk”.
Musíme se ještě seznámit s posledním programovým blokem zelené palety – blokem “Indikátor stavu modulu”. Ovládací tlačítka EV3 Brick jsou obklopena barevným indikátorem, který může svítit jednou ze tří barev: zelený, oranžová nebo červená. Odpovídající režim je zodpovědný za zapnutí a vypnutí barevné indikace (obr. 18 položka 1). Parametr “Barva” nastavuje barevné schéma indikace (obr. 18 položka 2). Parametr “Impuls” je zodpovědný za zapínání a vypínání režimu blikání barevného indikátoru (obr. 18 položka 3). Jak lze použít barevnou indikaci? Například je možné používat různé barevné signály během různých provozních režimů robota. To nám pomůže zjistit, zda program běží tak, jak jsme plánovali.

Obr. 18
Využijme nabyté znalosti v praxi a trochu si “přibarvíme” náš program z Úkolu 1.
Úkol 3:
- Přehrát signál “Start”
- Zapněte zelený indikátor plné barvy
- Zobrazte obrázek na obrazovce “Vpřed”
- Jeďte rovně na 4 otáčky motoru.
- Zapněte oranžově blikající barevný indikátor
- Otočte se
- Zapněte zeleně blikající barevný indikátor
- Zobrazte obrázek na obrazovce “zpět”
- Jeďte o 720 stupňů
- Přehrát signál “Stop”
Pokuste se vyřešit problém 3 sami, aniž byste se dívali na řešení! Hodně štěstí!